

东北大学 信息科学与工程学院
自主无人系统方向实验室
打造下一代自主无人系统引擎
实验室简介
东北大学信息科学与工程学院依托我校“双一流建设项目”建立了“自主无人系统方向实验室”。本实验室的主攻方向为自主无人系统安全运行技术,其中涉及单个无人系统的功能安全和信息安全、多无人系统安全协同与实时调度、网络攻击下无人系统容侵控制、无人系统高可靠电子电气架构设计,以及上述技术在冶金矿山自主无人系统中的应用。


成果介绍
自主无人系统安全运行的研究属于世界科技前沿研究领域,本实验室研究团队在该领域的理论研究处于国际领先水平,国际权威期刊发表 SCI 论文 152 篇(其中最顶级期刊IEEE Transactions on Automatic Control 17 篇、Automatica 9 篇),在全球系统安全领域引用最高的前 50 篇论文中占比 10%,ISI 他引 6732 次,研究成果 2021 年荣获辽宁省自然科学一等奖 1 项。
项目建设
目前已建设以下 8 个公共实验平台,这些平台涵盖了信息科学与工程学院现有团队的主要研究方向(即信息感知、智能分析、精准控制、优化决策),可有力的支持这些方向的教学与科研工作。
公共实验平台


公共实验平台一
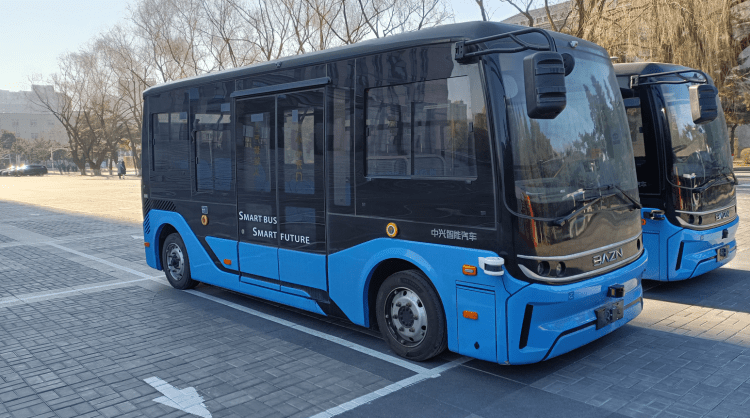
无人驾驶微公交

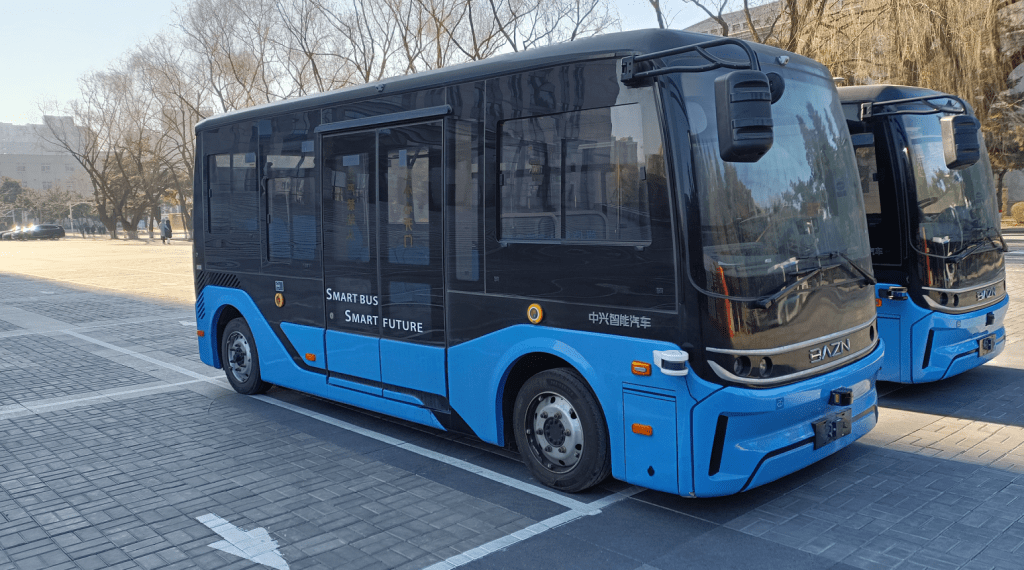

可达到的水平和目标
自主研发相关算法,从而可指定公交路线,使这3台无人驾驶微公交承担东北大学南湖校区的人员运送任务。项目建成后,在无人驾驶领域达到国内领先水平,使东北大学成为国内首家实际运行无人驾驶公交线路的高校。
公共实验平台二
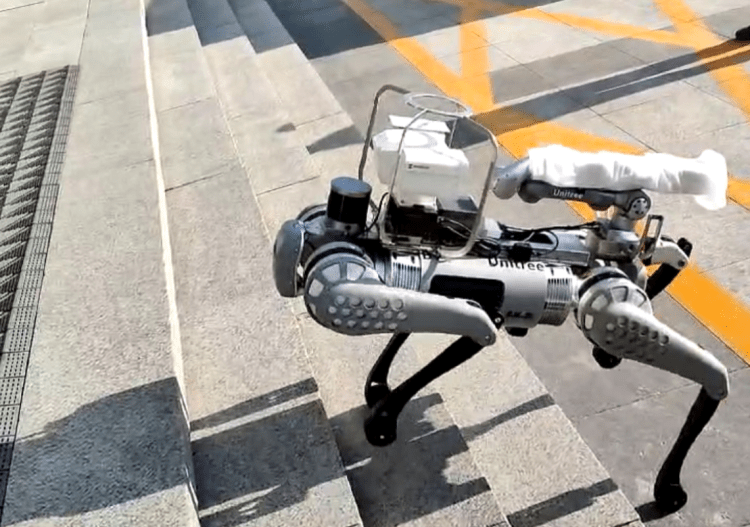
工业四足巡检机器人
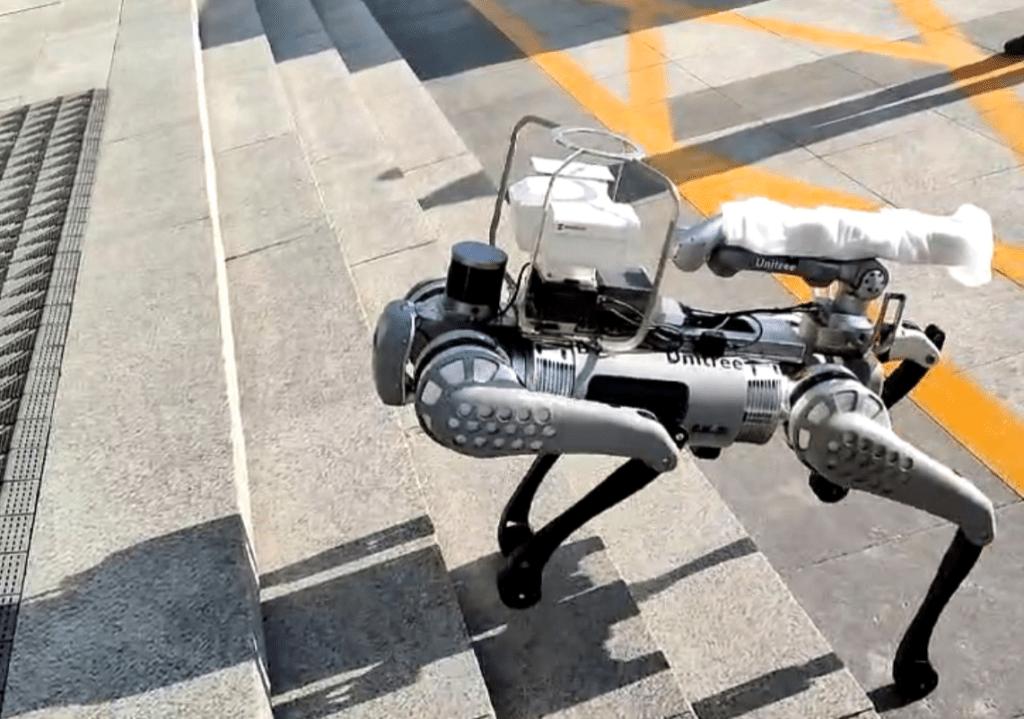

可达到的水平和目标
自主研发相关算法,可实现东北大学南湖校区综合楼/信息学馆的巡逻任务。项目建成后,在工业巡检机器人安全控制领域在国内处于引领地位,主导制定该领域的安全运行国家标准和行业标准。
公共实验平台三
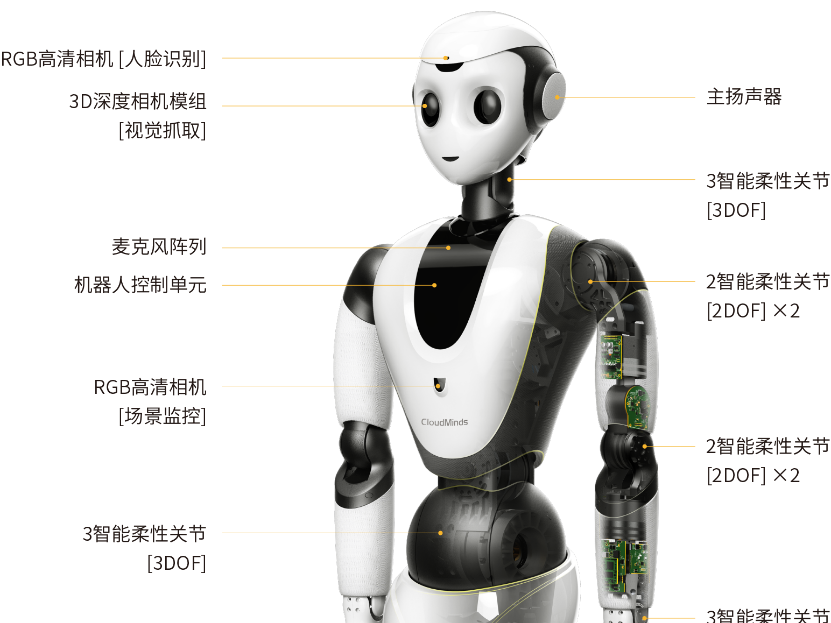
轮式双臂人形服务机器人
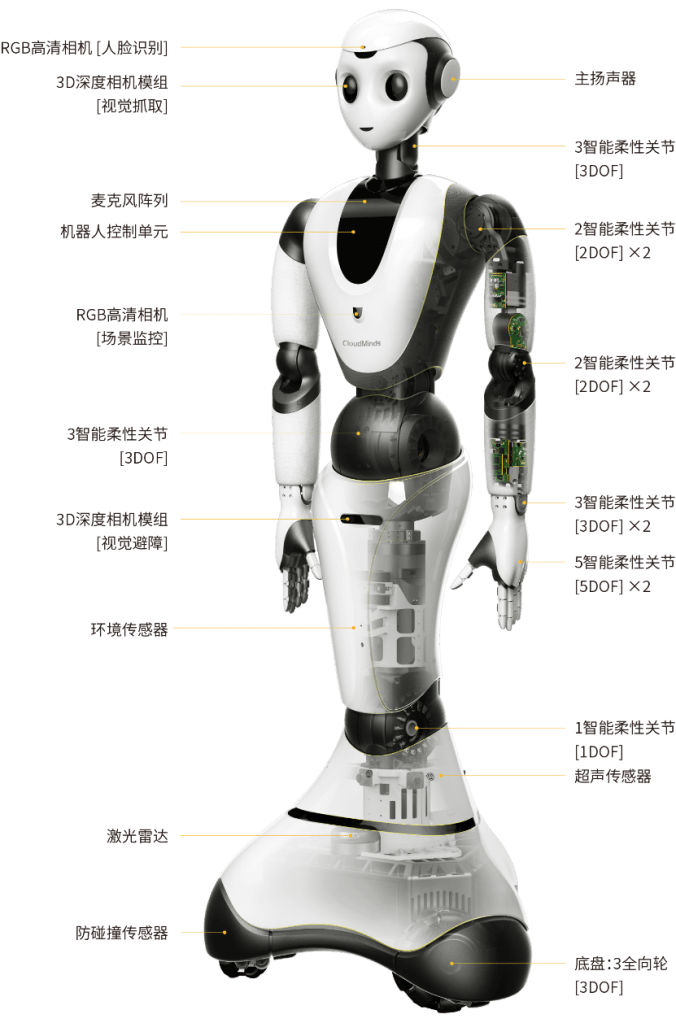
可达到的水平和目标
自主研发相关算法,可实现东北大学南湖校区综合楼正门的引导/咨询等服务。项目建成后,解决云端智能机器人故障诊断与容错自愈控制、故障预测与健康状态评价、预测性维护、网络攻击下的容侵控制等关键科学问题和技术难题。
公共实验平台四
软体机器人智慧示教系统

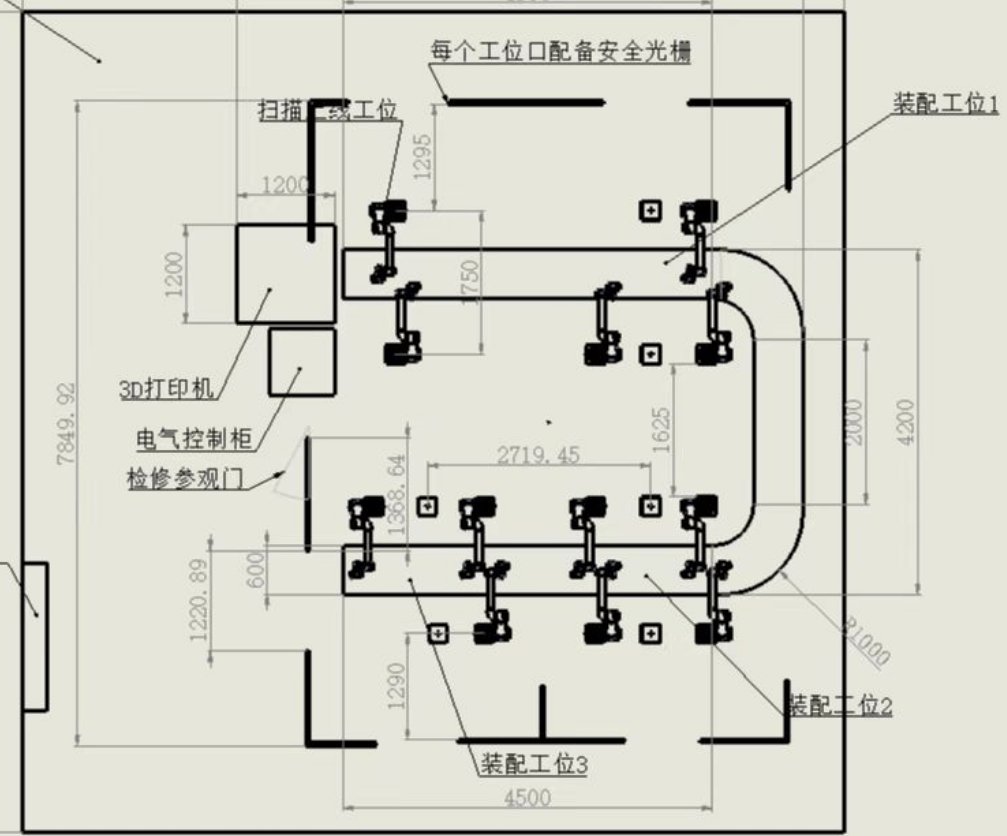
可达到的水平和目标:自主研发相关算法和软件,建立智慧工厂离散制造过程演示系统,可演示原材料收集/生产成型/装配的自动化、定制化按需制造过程。项目建成后,在智能制造领域的自主无人系统安全运行技术方面取得具有国际影响力的理论研究成果。
公共实验平台五
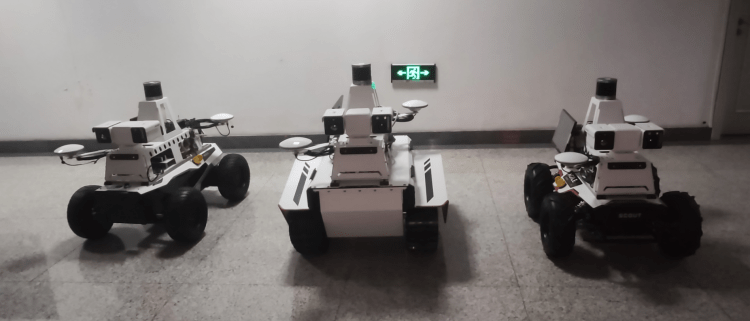
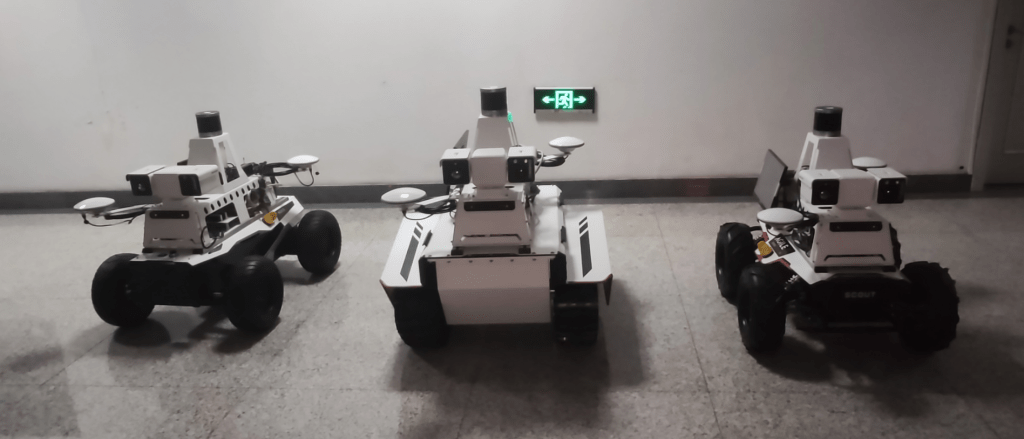
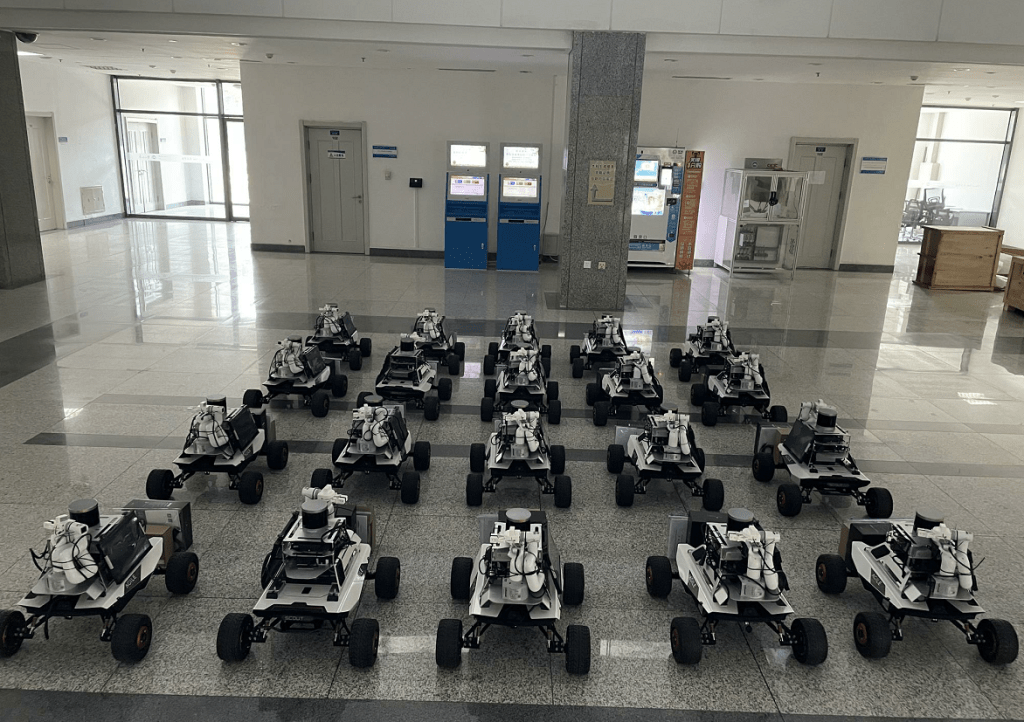
轮式巡检机器人
公共实验平台六
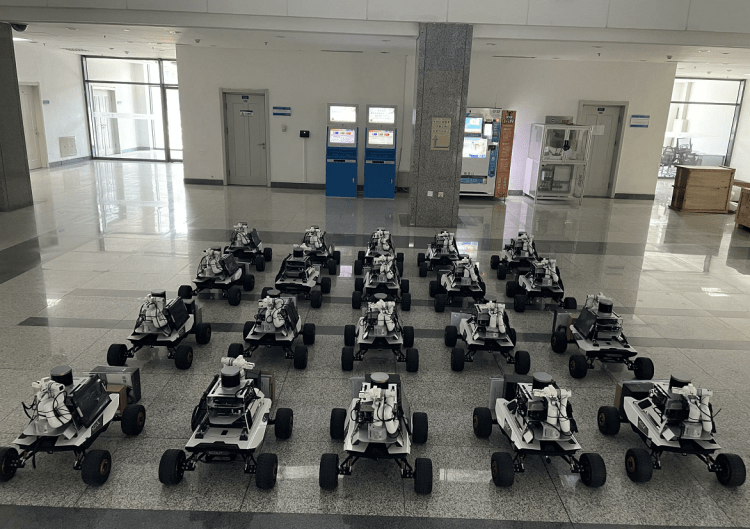
基于智慧交通沙盘的小型智能搬运机器人编队
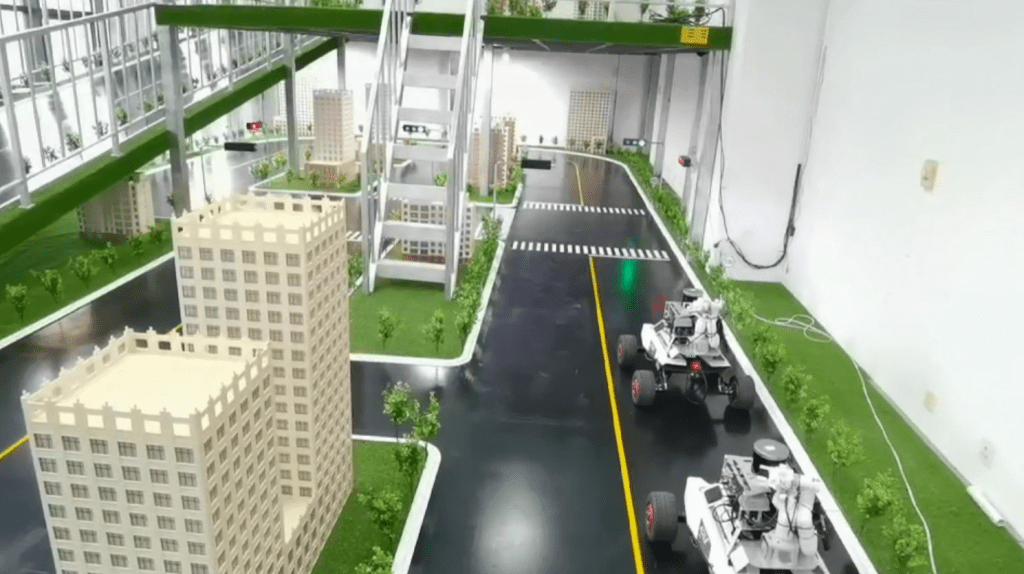
沙盘面积150平米,提供城市道路、绿化带、小区、城市标志建筑、高架桥等交通场景。沙盘道路采用滤清马路专用仿真材料,具有交通道路上的各种指示标志,如斑马线、转弯线、限速牌等。
公共实验平台七
巡检无人机

可达到的水平和目标:自主研发相关算法,建立基于多无人机编队的室内外巡检演示系统。项目建成后,在多巡检无人机安全控制研究领域取得一批高被引理论研究成果。
公共实验平台八
虚实融合 V2X 网络系统

可达到的水平和目标: 自主研发相关算法,建立无人驾驶微公交车联网虚实融合极限测试系统。项目建成后,建立的“无人驾驶微公交车联网虚实融合极限测试系统”具有国内领先水平。
加入我们
欢迎加入我们!我们是一个充满活力和创新精神的团队,致力于将最先进的技术应用于实际生产和生活中,为社会的发展做出贡献。我们的团队由一批具有丰富经验和创新能力的专业人才组成,在机器人技术、无人车、无人机、人工智能、控制理论等领域具有深厚的研究基础和丰富的实践经验。实验室提供良好的学习环境和发展机会,让每一位成员都能够充分发挥自己的才能和潜力。我们相信,只有团结协作、不断创新,才能够实现我们的愿景和目标。
实验室长期招收本科生、研究生和博士生,如果你对自主无人系统技术和人工智能算法充满热情,欢迎加入我们的团队,也欢迎各位老师依托本实验室的公共平台开展相关教学和研究工作,一起探索未知的领域,创造更美好的未来!
拥有以下技能将被优先考虑进入实验室:
- 拥有 B1 驾驶证,能够驾驶公交车
- 拥有机械设计经验,拥有机械绘图建模能力
联系地址:东北大学南湖校区综合楼 209
