

Northeastern University
Autonomous Systems Laboratory
Building the Next-Generation Autonomous Systems Engine
Lab Introduction
Welcome to “Autonomous Systems Laboratory” in the College of Information Science and Engineering, Northeastern University, China.
The laboratory’s main research direction is the safety operation technology for autonomous systems, which involves the functional safety and information security of individual unmanned systems, the security coordination and real-time scheduling of multiple unmanned systems, intrusion control of unmanned systems under network attacks, and the high-reliability electronic and electrical architecture design for unmanned systems.
Achievements Introduction
The research on safe operation of autonomous unmanned systems is a frontier field in world science and technology. The research team of this laboratory is at the international leading level in theoretical research in this field. They have published 152 SCI papers in internationally renowned journals (including 17 in the top-tier journal IEEE Transactions on Automatic Control and 9 in Automatica). They account for 10% of the top 50 most-cited papers globally in the system safety field, with 6732 citations by ISI. The research results won the First Prize of Liaoning Natural Science in 2021.
Project Construction
At present, the following 8 public experimental platforms have been built. These platforms cover the main research directions of the existing teams in the School of Information Science and Engineering (i.e., information perception, intelligent analysis, precision control, and optimization decision-making), which can strongly support teaching and scientific research in these directions.
Public Experimental Platforms


Platform 1
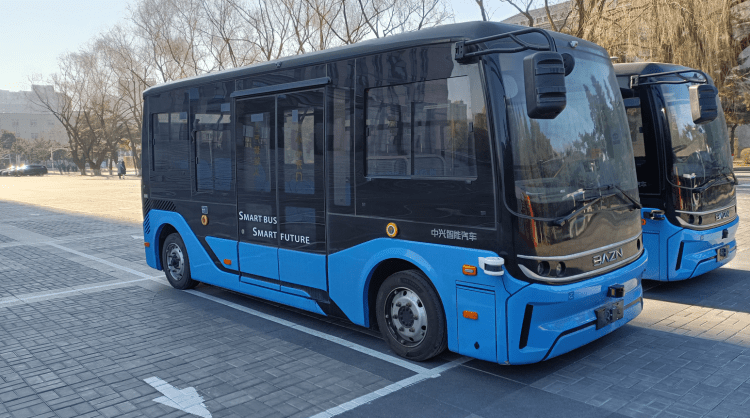
Autonomous Microbus

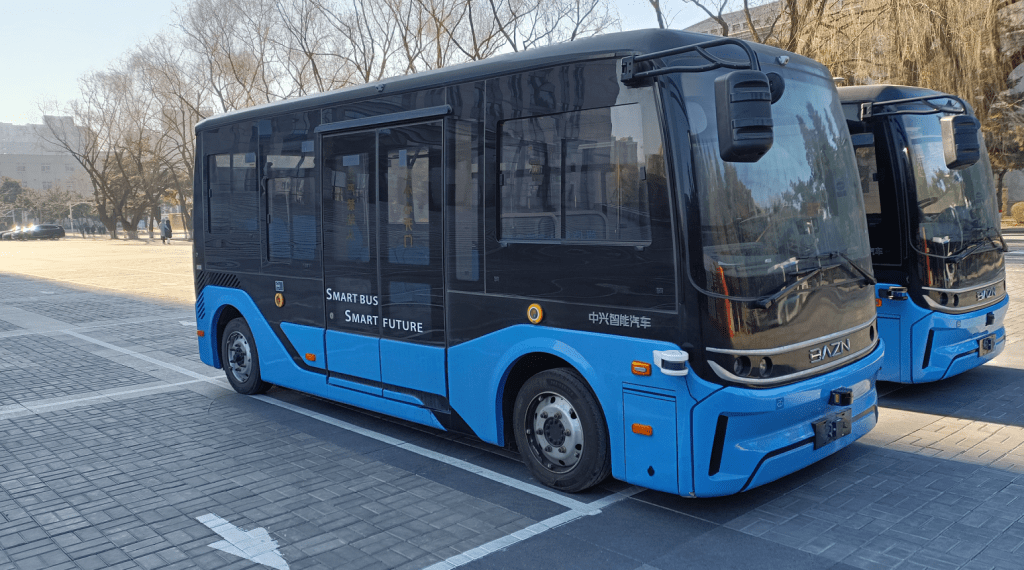

This experimental platform comprises three autonomous micro-buses, with the dimensions of 6*2*2.6m and the capacity to accommodate up to 19 passengers. Each micro-bus can travel up to 180 kilometers on a single charge. A team of researchers has developed the cutting-edge algorithms that enable these three driverless micro-buses to undertake transportation tasks within Northeastern University, China, following the designated bus routes. The successful completion of this project would place us at the forefront of unmanned driving technology in China, as our university would be the first to operate unmanned bus routes in the country.
Platform 2
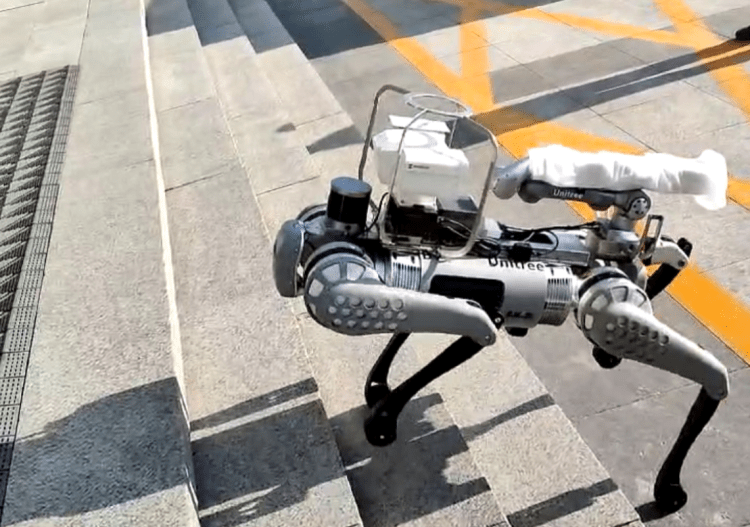
Industrial Quadruped Patrol Robot
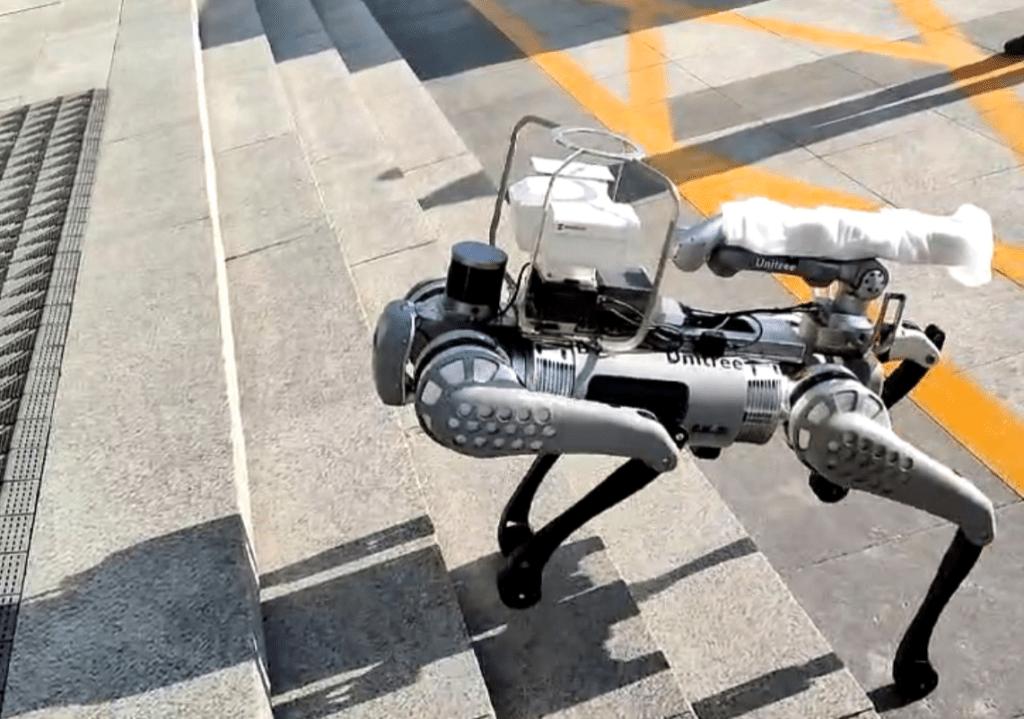

The experimental platform consists of two industrial quadruped inspection robots. Each robot has a maximum load capacity of 60kg and is capable of automatically going up and down stairs, and carrying many devices such as a dual-spectrum gimbal, a 3D LIDAR, a navigation system, a 6-axis mechanical arm, and gas sensors. With the help of the industrial quadruped inspection robots, we have developed the advanced algorithms that enable such robots to efficiently patrol various indoor floors of Northeastern University, China.
Platform 3
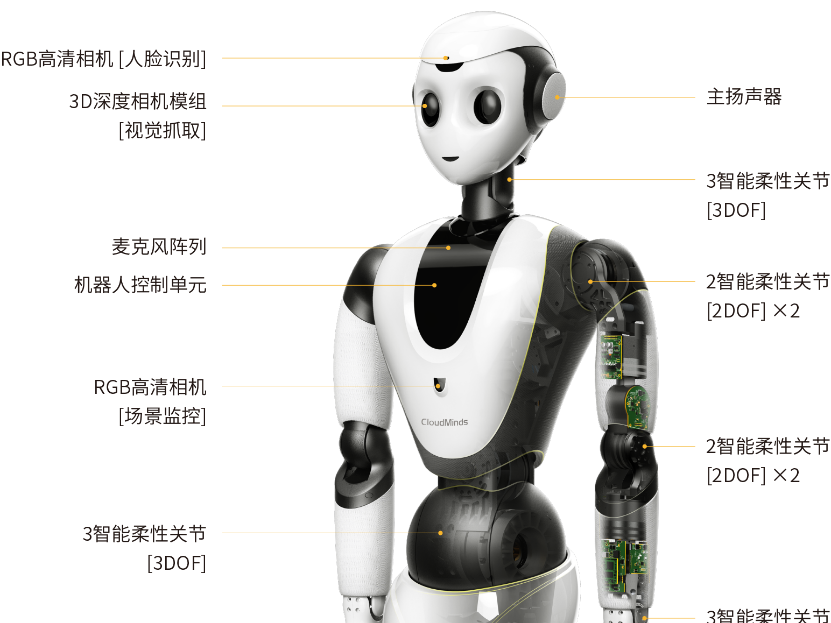
Wheeled Dual-Arm Humanoid Service Robot
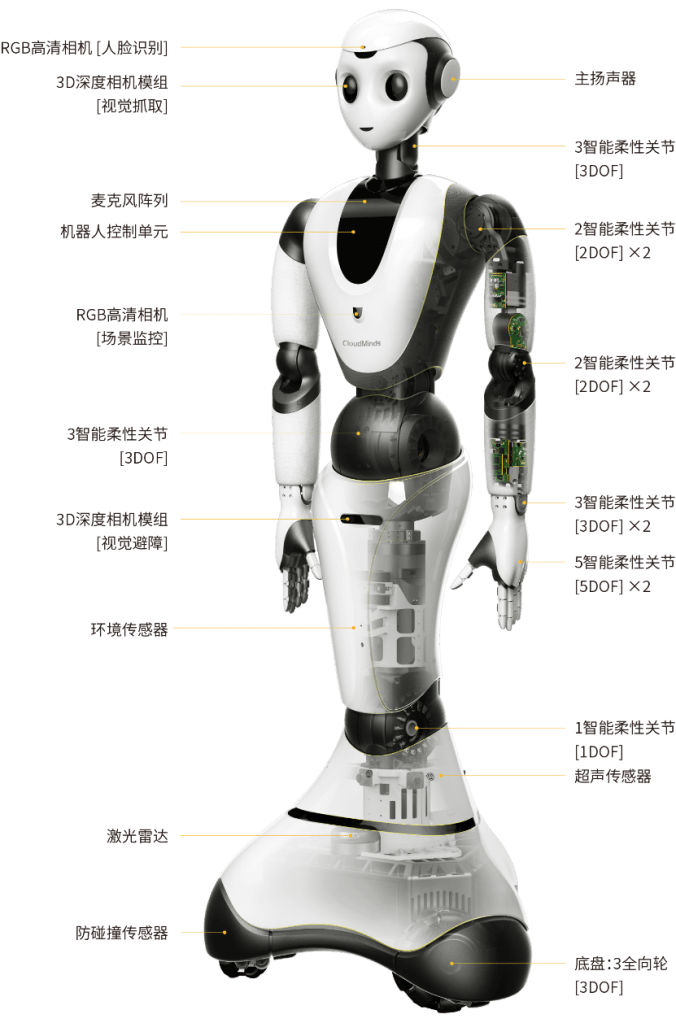
This robot has various degrees of freedom, including those for its head, arms, fingers, waist, and knees. It can carry a load of at least 1.5 kg with one hand, and 3 kg with two hands. The robot has an arm span of 0.6m and stands at a height of 1.5m. Additionally, it supports the metaverse, digital twin, and cloud control technologies. We have devised innovative algorithms for this robot, which allow it to provide guidance and consultation services at the entrance to the main building of Northeastern University.
Platform 4
Soft Robot Intelligent Teaching System

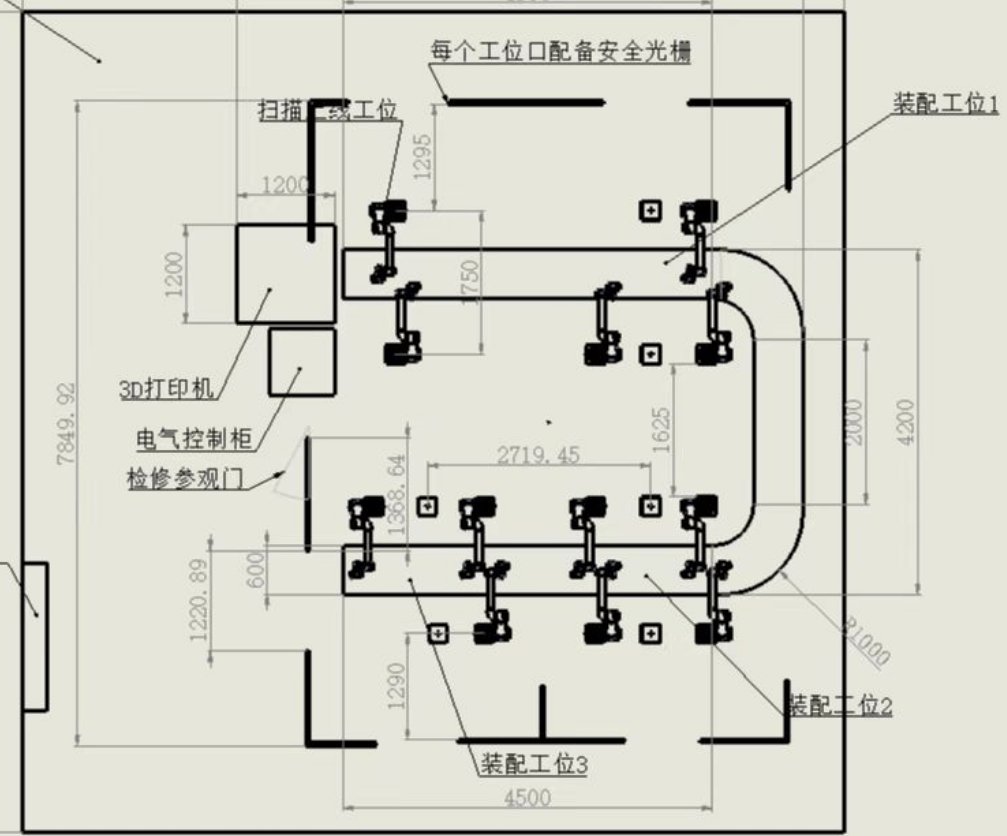
The platform consists of 12 robotic arms with six degrees of freedom, 10 soft pneumatic grippers, 1 set of vacuum cups with Vander Waal force, 2 sets of agile pneumatic modules, 2 types of mini vacuum clamps, 4 types of electric drive clamps, and 1 automated component transport system. Taking advantage of this platform, we have developed the algorithms and software to establish a discrete manufacturing demonstration system for a smart factory. This system effectively demonstrates the automated and customized on-demand manufacturing processes for raw material collection, production molding, and assembly.
Platform 5
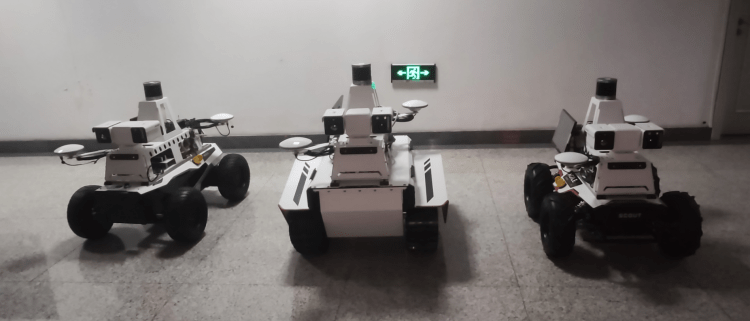
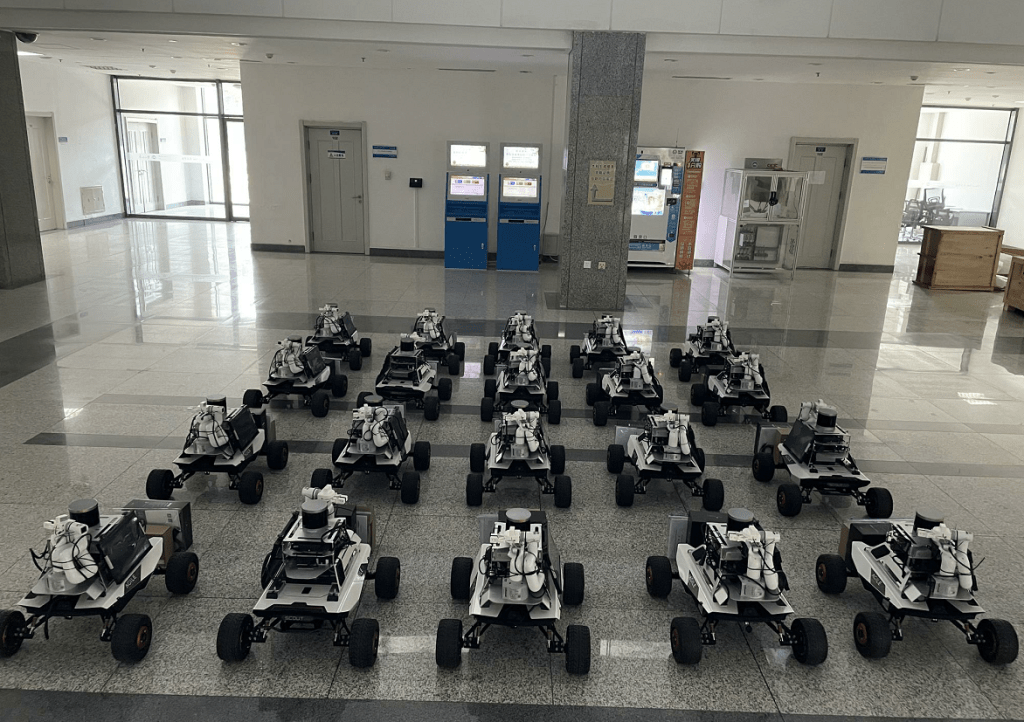
Wheeled Patrol Robot
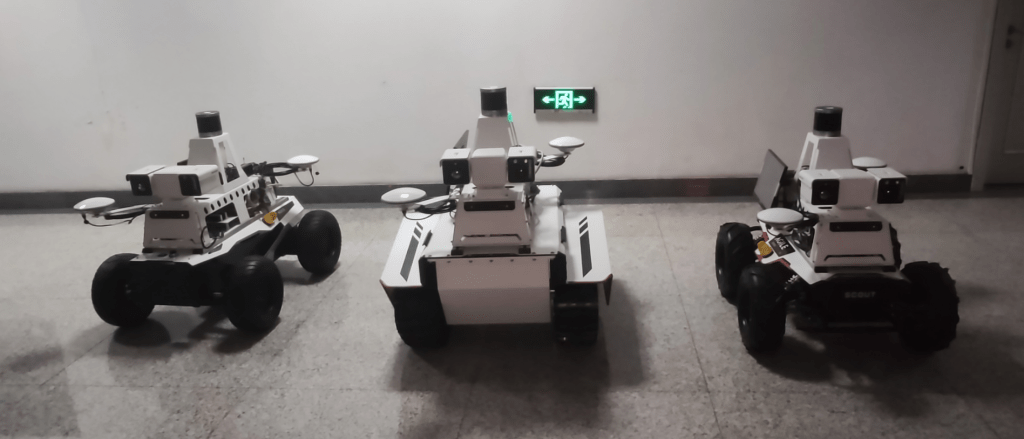
The platform consists of a fleet of three wheeled inspection robots equipped with state-of-the-art algorithms specifically designed for autonomous and comprehensive patrolling of the outdoor environment of Northeastern University. The robots operate continuously, providing 24/7 monitoring and the improved security measures.
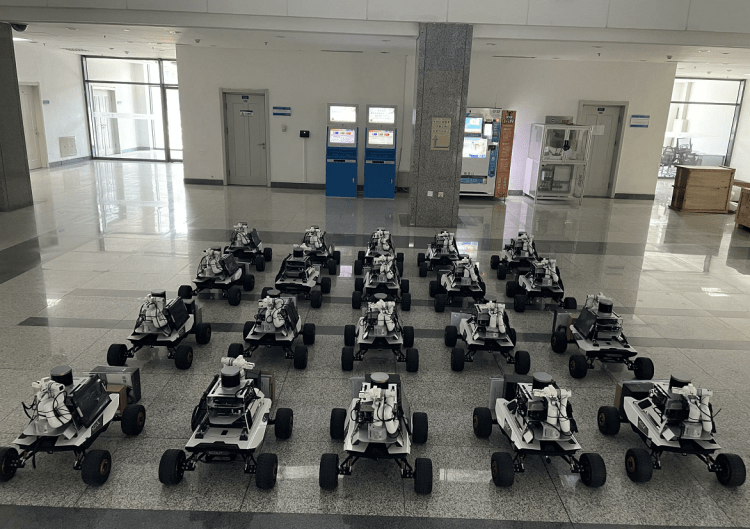
Platform 6
Mini Intelligent Material Handling Robot Formation
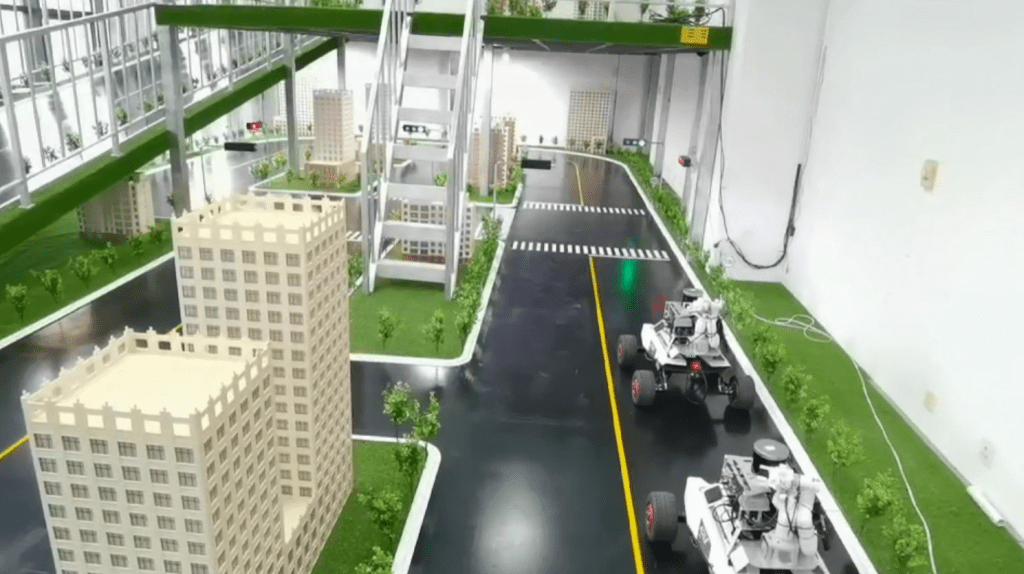
The sandbox covers an area of 150 square meters, providing traffic scenes such as city roads, green belts, residential areas, city landmark buildings, overpasses, etc. The sandbox roads use filtration road simulation materials and have various road signs, such as zebra crossings, turn lines, speed limit signs, etc.
Platform 7
Patrol Unmanned Aerial Vehicle

The platform is comprised of six quadcopter drones that support three navigation systems, namely BEIDOU, GPS, and GLONASS. These drones are equipped with long-focus visible, wide-angle visible, and infrared thermal cameras. Additionally, they support 2.4G and 5.8G video transmission and enable the algorithm development, including the autonomous navigation, robust control, fault tolerance, fault diagnosis, and inspection of the industrial equipment.
Platform 8
Mixed Reality V2X Network System

This system has been specifically designed to support scenarios featuring 60 or more background vehicles, with the ultimate goal of validating the processing capability of the V2X subsystem when dealing with significant amounts of data. It also includes an electronic map for the campus. With the system, users can develop three-dimensional networked simulation scenes and import the traffic simulation and real-world data. Furthermore, it is equipped to handle the lane-level data application and provides a virtual representation of the Northeast University campus.
Join Us
Welcome to join us! We are a vibrant and innovative team dedicated to applying the most advanced technologies to actual production and life, contributing to the development of society. Our team is composed of a group of professionals with rich experience and innovative capabilities, with a solid research foundation and rich practical experience in areas such as robotics, autonomous vehicles, drones, artificial intelligence, and control theory. The lab provides a good learning environment and opportunities for development, allowing every member to fully utilize their talents and potential. We believe that only by working together and constantly innovating can we achieve our vision and goals.
The lab is recruiting undergraduates, graduates, and doctoral students for the long term. If you are passionate about autonomous unmanned system technology and artificial intelligence algorithms, welcome to join our team. We also welcome teachers to carry out relevant teaching and research work based on the public platforms of this laboratory, explore unknown fields together, and create a better future!
Address: Comprehensive Building 209, Northeastern University, China
Email: wangjunsheng@ise.neu.edu.cn
